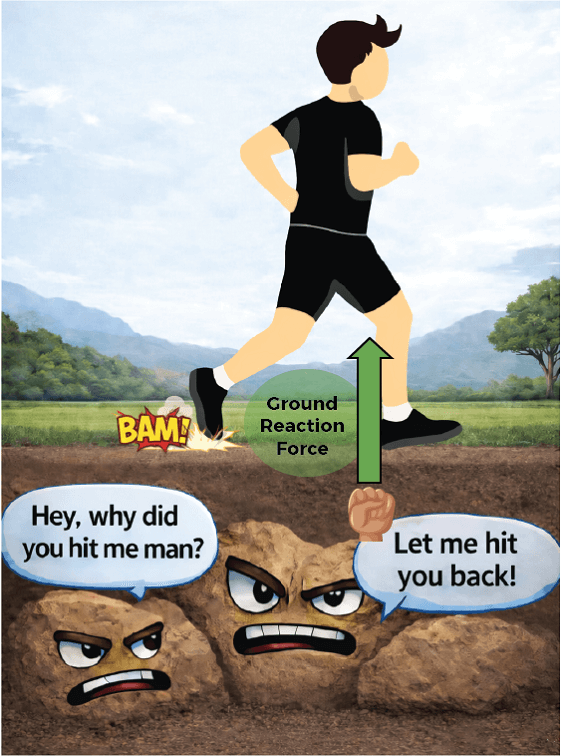
Most people are well aware of the concept of Newton’s 3rd law; Every action has an equal and opposite reaction. To some extent, it is also known that Ground Reaction Forces (GRFs) are based on this law.
You exert force on the ground and the ground exerts force back to you.
But how does one apply this knowledge to practice?
By the end of this article, you’ll have a better understanding of what Ground reaction forces are, their impact on the human body and application in rehab.
What are Ground Reaction Forces?
It is one of the external forces acting on the body that occurs when the body comes in contact with the ground/external surface.
By definition, it is force the ground exerts back on a body in contact with it.
Since it’s a contact force, i needs a point to act through – just like how gravity acts through the Centre of Mass (COM) of the
body.
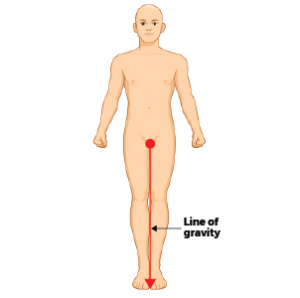
For GRF, this point is the Centre of Pressure (COP) of the foot.
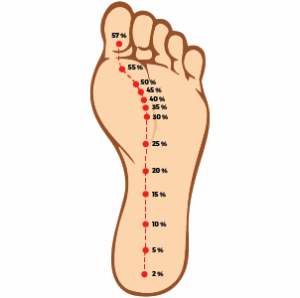
Based on how you stand, walk, run, or perform any lower body activity, the point of GRF will shift where the foot pressure is most concentrated.
(Point to note: GRF will not act on the body from the foot that’s off the ground)
Components of Ground Reaction Forces
GRFs are vector quantities, meaning they have both magnitude and direction. They are resolved into 3 components.
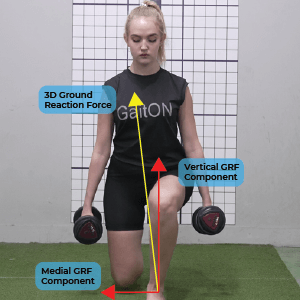
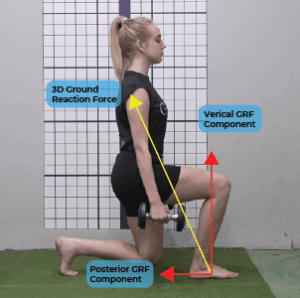
Vertical GRF (vGRF)
- Acts perpendicular to the ground, in a vertical direction
- Typically, the largest component – the magnitude can go up to 100-120%* of Body Weight
- It reflects impact and loading.
Anterior–Posterior GRF (AP GRF)
- Acts parallel to the ground
- A smaller component than vGRF – the magnitude is up to 20-30%* of Body weight
- Anterior force reflects propulsion, and posterior force reflects braking.
Medio–Lateral GRF (ML GRF)
- Acts side-to-side
- The smallest component with a magnitude of 5-10%* of body weight
- Related to balance, stability, and frontal-plane control
*The estimated values of GRFs are from a normal walking gait cycle
These components, when assessed along with time component, provide multiple metrics:
- Contact time: how long loading occurs
- Peak/mean force: how much loading occurs
- Loading rate: how quickly force builds
- Impulse: the overall “dose” of force applied during contact (how much force was delivered, for how long)
- Symmetry/variability: whether compensations are present
How ground reaction forces are measured
These forces are measured using force plates, containing load cells/strain gauge/piezo electric crystals to detect load. 1-dimensional force plates measure the vGRF while 3-dimensional plates measure all 3 components.
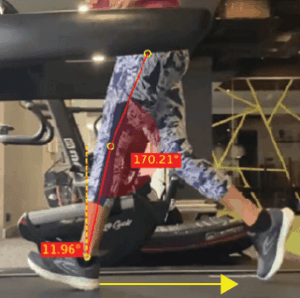
While force plates measure GRF directly, one might need a different approach in the case of absence of force plates. One way is to estimate these forces through movement and kinematics.
The goal is not to “guess the exact Newtons/kilograms,” of force but to read movement well enough to predict whether peak, loading rate, and braking/propulsion are trending up or down.
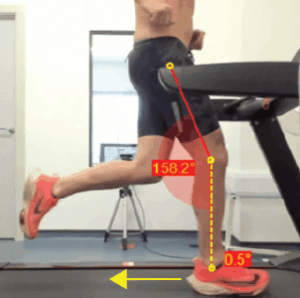
Vertical ground reaction forces
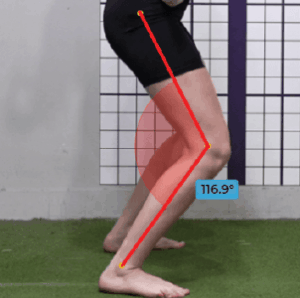
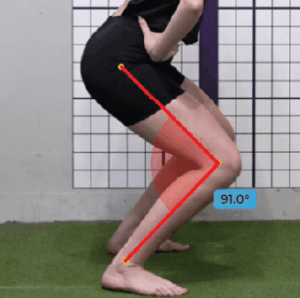
When the foot hits the ground, the hip, knee, and ankle are supposed to “bend” progressively throughout landing. This is important to absorb these ground reaction forces and ensure better shock absorption. If they don’t bend much (a stiffer landing), the body gets less time and cushioning to absorb these ground reaction forces. This usually makes the force rise faster (higher loading rate).
Movement
- Reduced hip, knee and ankle range of motion (ROM)
- Short time from initial contact to peak flexion (force rises quickly),
- Increased movement speed, eg., fast walking, quick jumps, etc
Implications
- Vertical GRF shows higher loading on the joints
Movement:
- Increased hip, knee and ankle ROM
- Longer time from initial contact to peak flexion (force rises slowly),
- Slower movement speed, eg., slow walking, softer jump landings, etc
Implications
- Vertical GRF shows lower loading and impact on the joints
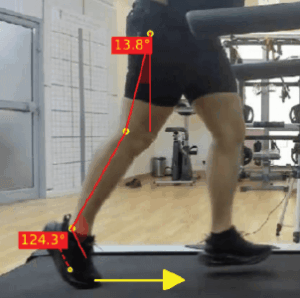
Anterior–Posterior (AP) ground reaction forces
This forward-backward component of GRF mainly reflects how the body controls speed. In early stance, the ground typically “pushes back” against forward motion (braking). In late stance, it helps move the body forward again (propulsion).
Posterior GRF (Braking phase)
Movement:
- Higher braking forces (more “slowing down” demand)
Implication:
- Greater braking impulse (more total braking over stance)
Movement:
- Foot landing closer under the body (reduced overstride)
- Higher cadence with shorter steps
- Smoother forward progression with less “reaching” at contact
Implication:
- Lower braking forces
- Lower braking impulse
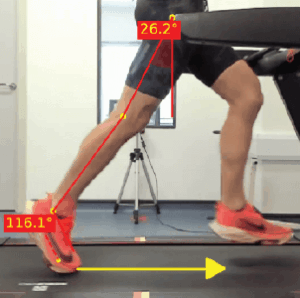
Anterior GRF (Propulsion phase)
Movement:
- Reduced hip extension in late stance (poor trailing limb position)
- Early heel rise or limited ankle push-off mechanics
- Short or rushed late stance (less time to generate push-off)
Implications:
- Reduced propulsive force (less “push-forward” contribution)
- Reduced propulsive impulse (less total propulsion)
Movement:
- Better trailing limb position in late stance (more hip extension before toe-off)
- Stronger, more coordinated push-off through the ankle/forefoot
- A smooth transition from braking to propulsion
Implications:
- Higher propulsive force
- Greater propulsive impulse
Medial–Lateral (ML) ground reaction forces
ML GRF is the side-to-side component of the ground’s force. It reflects how much the body is working to control balance and side-to-side movement, especially during single-leg support.
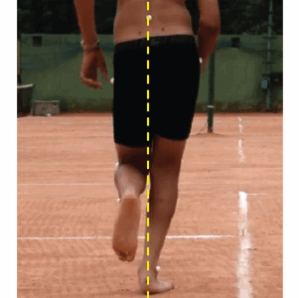
Movement:
- Narrow step width (feet landing close to the midline)
- Excessive side-to-side trunk sway or trunk lean
- Pelvic drop or poor single-leg hip control during stance
- Large side-to-side movement of the pelvis/COM during walking or running
- More lateral tasks (cutting, side steps, single-leg landings)
Implications:
- Higher side-to-side control demand on the limb, and often greater frontal-plane loading challenges at the hip, knee, and ankle.
Movement:
- A comfortable step width (not excessively narrow)
- Stable trunk with minimal side-to-side sway
- Better pelvic control in single-leg stance
- Smoother COM path with less lateral shift
- Controlled progressions in lateral movements (gradual exposure)
Implications:
- Lower side-to-side forces and a more stable loading pattern through the lower limb.
Quick summary to modify ground reaction forces on body
- Speed, cadence, step length/overstride (foot relative to COM at contact)
- Contact/stance time (video frames are enough)
- Knee flexion at initial contact and peak knee flexion in early stance (load acceptance ROM)
- Ankle dorsiflexion/tibial progression in early stance
- Trunk lean (forward for AP strategy, lateral for ML strategy)
- Step width (ML demand and balance strategy
Clinical Applications
Following a thorough assessment, a clinician may want to reduce joint loading, improve stability, improve push-off mechanics, etc. Altering the way GRFs act on the body can help achieve these goals
The key is to decide which direction is needed: building capacity (tolerate more force) or reducing irritation (temporarily lower force). Then choose the GRF component to target—vertical, braking (posterior), propulsion (anterior), or medial–lateral.
Improving propulsion (anterior GRF)
Improving propulsion matters because it often:
- Reduces overall muscular demand for a given speed (less “working hard to move forward” for the same outcome).
- Improves efficiency—more forward movement comes from late stance push-off rather than constant repositioning of the limb.
- Reduces compensations such as overstriding and excessive braking, which can increase stress elsewhere.
- Delays fatigue in walking/running, because each step contributes more forward drive.
Better propulsion usually comes from improving late-stance “push-off” capacity and position. Clinically, that means strengthening the plantarflexors (calf–Achilles) and hip extensors, then progressing to faster, more elastic work as tolerance improves.
To bias mechanics toward propulsion –
- Gradual exposure to higher running/walking speeds,
- Short accelerations, and;
- Incline surfaces are usually effective
Reducing braking (posterior GRF)
Reducing braking matters because it often:
- Limits unnecessary “slowing down” with every step, so forward movement feels smoother and requires less effort to maintain speed.
- Decreases the load associated with repetitive deceleration, which can reduce stress on tissues that are sensitive during early stance.
- Excess braking often shows up with overstriding.
- Bringing foot contact closer under the body and slightly increasing cadence commonly reduces braking demand.
- Early on, it also helps to limit aggressive deceleration tasks (hard stops, sharp cuts) until symptoms and control improve.
Building vertical loading capacity (vertical GRF)
Vertical demands increase with speed and with plyometric intensity. Rehab progressions typically move from slow, controlled landings to quicker contacts (hops, skips, bounds), increasing volume and intensity in small steps. The practical target is often tolerance to repeated contacts and loading rate, not just a higher peak.
Improving side-to-side control (ML GRF)
ML demands become more obvious in single-leg stance, cutting, and lateral movements. Better trunk and pelvis control reduces unnecessary side-to-side motion. Progress laterally in stages—controlled step-down patterns and lateral strength first, then bounds and planned cuts, and only then reactive change-of-direction work.
Let’s discuss your homework!
To understand GRFs better, perform the following actions to observe the impact of these forces on your joints
- Perform 2 jumps
- Jump 1: Land soft.
- Jump 2: Land stiff
- Take 2 rounds of walking
- Round 1 – Slow
- Round 2 – fast
Observe where you feel more muscular effort, where movement seems easier, where load increases and decreases. Feel free to share your experiences in the comments below!
We, at GaitON understand that not everyone has access to force plates. Hence, our 2D MoCap modules are useful in helping estimate GRFs. Feel free to contact us with your jump analysis requirements!
ABOUT THE AUTHOR

GAYATRI SURESH (PT)
Gayatri Suresh (PT) is a Biomechanist who has completed her B.P.Th from DES College of Physiotherapy and M.P.T (Biomechanics) from SRM College of Physiotherapy, SRMIST. Her field of clinical expertise is in movement assessments through video analysis. Apart from her work at Auptimo, she works as a Clinical Specialist at Rehabilitation Research and Device Development, IIT Madras. She has won gold medals for her Research presentations and for securing First rank with distinction in her MPT degree respectively.
References
- Neumann DA. Kinesiology of the musculoskeletal system: foundations for rehabilitation. 3rd ed. St. Louis (MO): Elsevier; 2017. Chapter 15, Kinesiology of walking.
- Wille CM, Lenhart RL, Wang S, Thelen DG, Heiderscheit BC. Ability of sagittal kinematic variables to estimate ground reaction forces and joint kinetics in running. J Orthop Sports Phys Ther. 2014 Oct;44(10):825-30. doi: 10.2519/jospt.2014.5367. Epub 2014 Aug 25. PMID: 25156183; PMCID: PMC4297621.
- Peterson CL, Kautz SA, Neptune RR. Braking and propulsive impulses increase with speed during accelerated and decelerated walking. Gait Posture. 2011 Apr;33(4):562-7. doi: 10.1016/j.gaitpost.2011.01.010. Epub 2011 Feb 26. PMID: 21356590; PMCID: PMC3085638.
- Rachel K. Straub, Alex Horgan, Christopher M. Powers, Estimation of vertical ground reaction force parameters during athletic tasks using 2D video, Gait & Posture, Volume 90, 2021, Pages 483-488,
The information found within this site is for general information only and should not be treated as a substitute for professional advice from a licensed medical practitioner. Any application of exercises and diagnostic tests suggested is at the reader’s sole discretion and risk.