‘Limbs like to swing.’ Swing phase running biomechanics has been an area of interest for a long time, considering it to be an essential skill across sports. Many a time, sports performance is dictated by running form, speed, and efficiency.
Phases of Running
Similar to walking, running is comprised of 2 phases:
Stance phase
Foot is in contact with the ground
Swing phase
Foot is off the ground
Unlike walking, running does not have a double support phase, replaced by a float phase. Furthermore, the swing duration exceeds the stance duration; another contrast to walking.
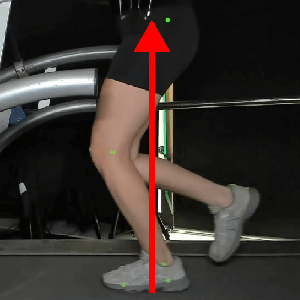
Introduction to the swing phase of running
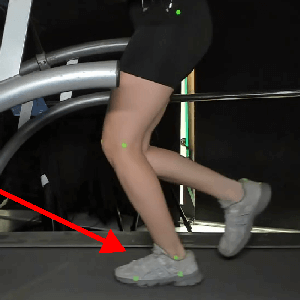
The swing phase in running begins with push off (as the foot lifts off the ground) and ends at initial contact. It’s further divided into the following subphases –
Early Swing (Initial Swing)
Early Swing (Initial Swing)
This phase begins when the foot lifts off the ground, following toe-off in the stance phase.
Key Characteristics:
- The leg accelerates forward.
- The hip flexors activate to lift the thigh.
- The knee begins flexion to shorten the limb, reducing its moment of inertia.
- The ankle dorsiflexors activate to prevent toe drag.
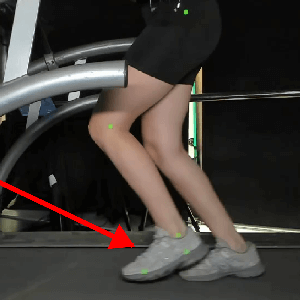
Mid-Swing
Mid-Swing
The leg continues to move forward, reaching a neutral position relative to the body. i.e., under the pelvis.
Key Characteristics:
- Maximum knee flexion occurs to allow for efficient forward movement.
- The hip flexion increases, propelling the leg forward.
- The limb passes beneath the body, preparing for extension.
- The foot remains dorsiflexed to avoid ground contact.
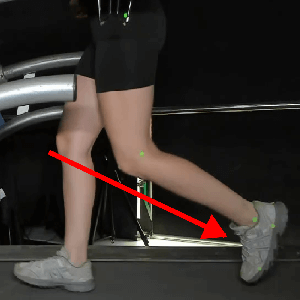
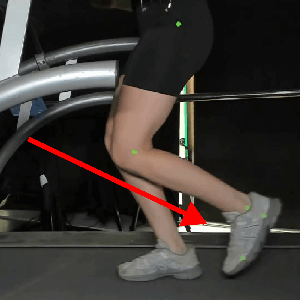
Late-Swing
Mid-Swing
This phase transitions the leg from forward motion to preparation for ground contact, where the forward motion is completed and knee extends to prepare for ground contact.
Key Characteristics:
- The knee extends to position the foot for initial contact.
- Hip flexion decreases as the thigh begins to decelerate.
- The hamstrings and gluteal muscles activate to control the forward momentum of the leg.
- Ankle dorsiflexion continues to maintain foot positioning.
Purpose of the swing phase in running
- Energy Transfer: The swing phase helps prepare the body for propulsion in the next stance phase.
- Injury Risk Mitigation: Proper swing mechanics reduce stress on the lower extremities, preventing overuse injuries.
- Running Efficiency: Optimized mechanics minimize energy wastage and enhance running economy.
- Unlike walking, where the swing phase is shorter, running involves a more dynamic swing phase with a double-float period where neither foot touches the ground.
Key Biomechanical Parameters of the swing phase in running
Following are the key biomechanical parameters assessed during the swing phase and their interpretations:
A study by Blum et. al investigated the biomechanical and control strategies involved in swing leg dynamics during human running to gain insight into stability, energy efficiency, and ground contact.
The following parameters affected swing phase dynamics:
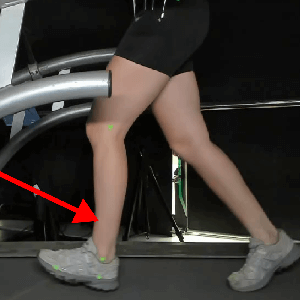
1. Leg Angle
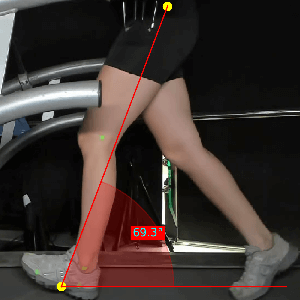
Leg Angle
The angle formed between the leg and the horizontal during the swing phase, influencing foot placement and stability.
Purpose – This angle controls the foot’s direction during landing.
Assessment – Motion Capture systems, Inertial Measurement Units, Goniometers
Key metrics for analysis
- Peak retraction angle before touchdown (initial contact).
- Symmetry of leg movement between strides
Interpretation – Retraction (reducing angle) before touchdown reduces vertical impacts and improves stability.
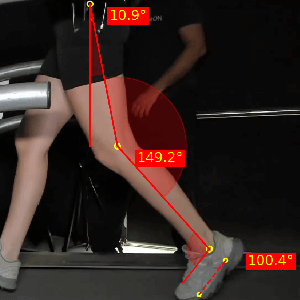
2. Leg Length
Leg Length
The distance between the hip and foot during the swing phase, influencing stride clearance and ground impact.
Purpose – Influences the swing dynamics by lengthening or shortening.
Assessment – Marker-based motion capture, mathematical modelling
Key metrics for analysis
- Maximum leg length during the swing phase.
- Rate of leg shortening during swing retraction.
- Symmetry of leg length changes between strides.
Interpretation – Leg length must shorten during swing phase (just after push off) by achieving hip extension and knee flexion, to prevent the foot from dragging or striking the ground prematurely and facilitate smoother transitions during the swing-to-stance phase.
A review paper by Thordarson DB set an early base for the theory of running biomechanics. The author described various phases of stance and swing, along with their characteristics.
1. Swing Time (Ideal - 0.374 seconds)
Purpose – Duration of swing phase i.e., from push-off to initial contact
Assessment – Motion capture, Instrumented Treadmills, Pressure insoles
Key metrics for analysis
- Swing Time Duration
- Percentage of Swing Time in the Gait Cycle
- Symmetry Index for Swing Time
- Swing Time Variability
- Swing-to-Stance Time Ratio
Interpretation –
- Shorter Swing Times: Associated with faster running, reducing the overall gait cycle duration. Seen in elite runners
- Longer Swing Times: Help runners adapt to uneven or unpredictable terrain by providing more time for leg positioning. Seen in novice/recreational runners
2. Hip and Knee Muscle activity
Purpose – For efficient energy transfer. This is achieved by –
- Hip flexion with concentric contraction of the rectus femoris for generating power and knee flexion with eccentric contraction of distal rectus femoris for absorption of power in the initial swing phase
- Hip extension with concentric contraction of the hamstring for generating power and knee extension with eccentric contraction of the distal hamstring for absorption of power in the terminal swing phase.
Assessment – EMG, Motion Capture (Tracking joint angles can correlate with muscle activity)
Key metrics for analysis & interpretation
- Peak Activation Timing: Identifies the specific point in the running cycle when muscle activity is highest.
- Duration of Activation: Measures how long a muscle remains active during the swing phase.
- Amplitude of EMG Signal: Reflects the intensity of muscle activity. Higher amplitudes indicate greater recruitment.
- Muscle Co-Activation Ratio: Compares simultaneous activation of synergistic or antagonistic muscles, such as rectus femoris vs. hamstrings.
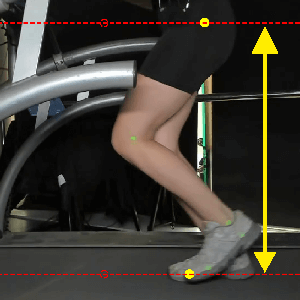
3. Center of Gravity excursion
Observed at its highest position during peak float phase of running gait and lowest during peak knee flexion in midstance. This is measured by tracking the vertical movement of the COG during the running gait cycle, typically measured as the maximum height difference between the lowest (stance phase) and highest (float phase) points.
Purpose- Optimal vertical excursion minimizes energy loss by balancing upward propulsion with forward momentum. Excessive vertical motion can waste energy, while insufficient motion may hinder stride mechanics.
Assessment – Motion capture, IMUs
Key Metrics –
- Maximum Vertical Excursion: The peak vertical height of the COG during the float phase, relative to its lowest point during the stance phase.
- Vertical Displacement Range: The total range of COG movement within a stride cycle (highest to lowest point).
- Flight Time: Duration of the float phase, representing how long the COG is in the air.
Interpretation –
- Optimal Vertical Excursion: 6-10 cm
- Excessive Vertical Excursion: Suggests wasted energy due to unnecessary upward motion, often seen in recreational runners. Furthermore, increased vertical oscillation leads to increased joint loading at impact.
- Reduced Vertical Excursion: May indicate overemphasis on forward momentum, possibly leading to reduced stride efficiency.
A study by Rottier et al investigated the influence of swing leg technique on maximum running speed. Here’s what they found –
1. Angular Velocities
Angular velocity refers to the speed of joint rotation during the swing phase of running. Efficient angular velocities ensure rapid and controlled leg movement to prepare for the next stride.
Purpose – Optimal angular velocities allow for precise and efficient limb movement during the swing phase, reducing swing time and improving stride frequency.
Assessment – Motion Capture Systems, Computer Simulations
Key Metrics
- Knee Angular Velocity: Faster eccentric velocities during early swing controls momentum and concentric angular velocity in late swing improves positioning for optimal touchdown.
- Hip Angular Velocity: Higher concentric velocities at the hip support efficient leg recovery.
- Ankle Angular Velocity: Controlled eccentric velocities enable precise foot placement for stance.
Interpretation
- Optimal Angular Velocities: Contribute to efficient swing phase dynamics, reducing energy expenditure and improving stride efficiency.
- Reduced Angular Velocities: May hinder rapid leg recovery and negatively affect running performance.
2. Mean Net Knee Extension Torque
Knee extension torque refers to the rotational force generated at the knee joint during the swing phase to extend the knee, crucial for leg recovery and positioning. Elite runners generate 80.6 Nm, significantly higher than sub-elite runners (59.0 Nm)
Purpose – Higher knee extension torque enables rapid leg recovery and better positioning, reducing swing time and optimizing stride efficiency.
Assessment – Force Plates, Motion Capture Systems
Key Metrics
- Average Torque Magnitude: The mean force produced by the knee extensors during the swing phase, measured in Newton-meters (Nm).
- Torque Duration: The total time over which knee extension torque is generated during the swing phase.
- Torque-Angle Relationship: The interaction between knee joint angle and torque production, showing how effectively force is generated across the range of motion.
- Torque Variability: The consistency of knee extension torque across multiple strides, indicating control and efficiency.
- Peak Torque: The maximum force produced by the knee extensors at a specific point during the swing phase.
Interpretation
- Optimal Knee Torque: Enables faster leg repositioning and contributes to improved stride mechanics.
- Reduced Torque: Leads to inefficient swing phase dynamics and slower running speeds.
3. Mean Net Hip Extension Torque
Hip extension torque represents the force exerted at the hip joint during the swing phase. Sub-elite runners generate higher torque (152.1 Nm) than elite runners (133.9 Nm). This difference indicates a shift in force reliance on the knee and ankle in elite runners, improving energy efficiency.
Purpose – Balanced hip extension torque supports leg recovery and ensures stability during the swing phase.
Assessment – Motion Capture Systems, Accelerometers, IMUs
Key Metrics – same as mentioned before
Interpretation
- Balanced Hip Torque: Supports efficient swing motion without overloading the hip joint.
- Excessive Hip Torque: Suggests inefficiencies in joint force distribution, limiting performance.
4. Flight Time (100 - 150ms)
Flight time is when the body remains airborne between steps, allowing the swing leg to reposition. Elite runners exhibit slightly longer flight times (0.144 seconds) compared to sub-elite runners (0.143 seconds), providing more time for leg recovery i.e., the process of resetting and repositioning the swing leg for the next step in a way that is biomechanically efficient and energy-saving.
Purpose – Adequate flight time ensures efficient leg positioning and smoother transitions between strides.
Assessment- Motion Capture Systems, Force Plates
Key Metrics
- Duration of Flight Time
- Vertical CoM Displacement
- Horizontal CoM Displacement
- Flight-to-Stance Ratio
- Variability of Flight Time
Interpretation
- Optimal Flight Time: Balances airborne duration with efficient stride transitions.
- Reduced Flight Time: May compromise leg positioning and hinder stride mechanics.
- Gender differences: Shorter flight times in female runners
- Age differences: Shorter flight times in older runners
Stance parameters influencing swing phase in running
Take-off angle and velocity
Influences distance covered in swing and height of peak vertical COM
Peak Vertical GRF in midstance
Generates higher upward momentum, influencing longer flight time and swing leg preparation
To summarise, various biomechanical parameters of the swing phase shed light on optimal running biomechanics, strategies to maintain stability, reduce risk of injury and enhance distance running performance.
GaitON offers a comprehensive 2D analysis to measure running gait. To book a demo, or get a running analysis done, contact us today!
ABOUT THE AUTHOR
GAYATRI SURESH (PT)
Gayatri Suresh (PT) is a Biomechanist who has completed her B.P.Th from DES College of Physiotherapy and M.P.T (Biomechanics) from SRM College of Physiotherapy, SRMIST. Her field of clinical expertise is in movement assessments through video analysis. Apart from her work at Auptimo, she works as a Clinical Specialist at Rehabilitation Research and Device Development, IIT Madras. She has been conferred with gold medals for her Research presentations and for securing First rank with distinction in her MPT degree respectively
REFERENCES: Swing phase running biomechanics
- Blum Y, Lipfert SW, Rummel J, Seyfarth A. Swing leg control in human running. Bioinspir Biomim. 2010 Jun;5(2):026006.
- Thordarson DB. Running biomechanics. Clin Sports Med. 1997 Apr;16(2):239-47.
- Rottier TD, Allen SJ. The influence of swing leg technique on maximum running speed. J Biomech. 2021 Sep 20;126:110640.
- van Oeveren BT, de Ruiter CJ, Beek PJ, van Dieën JH. The biomechanics of running and running styles: a synthesis. Sports Biomech. 2024 Apr;23(4):516-554. doi: 10.1080/14763141.2021.1873411. Epub 2021 Mar 4. PMID: 33663325.